Inseguitore solare
Questo dispositivo controlla l'inseguimento dei pannelli solari su inseguitori solari o sistemi simili in base alla posizione del sole utilizzando dati astronomici. L'inseguimento viene eseguito su un singolo asse sul piano orizzontale, utilizzando i dati di elevazione e azimut del sole. Per evitare ombreggiamenti tra i pannelli solari, è implementata una funzione che elimina tali ombreggiamenti tramite correzione dell'angolo. Durante il giorno, l'inseguitore si muove da est a ovest. Dopo il tramonto, l'inseguitore ruota nuovamente verso sinistra la sera. Il controllo si basa sulle coordinate geografiche e sull'ora. A seconda della variante, la regolazione dell'angolo dell'inseguitore avviene tramite la sua velocità (controllo orario senza encoder rotativo) o tramite un encoder rotativo assoluto. Sono previsti due finecorsa per limitare la rotazione e per la sincronizzazione. Due uscite a relè, una per la rotazione verso ovest e una per la rotazione verso est, sono implementate per il controllo del motore. Dopo un'interruzione di corrente, l'unità di controllo dell'inseguitore sposta immediatamente l'inseguitore solare nella posizione attuale del sole. Richiede solo la tensione di rete necessaria, un circuito di protezione contro l'inversione di marcia e un motore trifase con riduttore. Viene installato un finecorsa in ogni direzione, uno per la rotazione verso est e uno per quella verso ovest. Per questo non sono necessari costosi sensori angolari.
Compensazione delle ombre
Quando l'inseguimento avviene esclusivamente in base alla posizione del sole, i pannelli possono ombreggiarsi a vicenda a basse angolazioni, a seconda delle dimensioni e dell'inclinazione del pannello. Ciò riduce significativamente la resa dell'impianto solare. L'elettronica previene questo ombreggiamento dovuto alla progettazione ruotando l'inseguitore rispetto alla luce solare diretta al mattino e alla sera. I pannelli vengono quindi illuminati lateralmente.
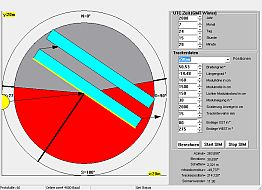
Simulazione e parametrizzazione PC
Il programma per PC può simulare il percorso del sole nel tempo in una determinata posizione geografica. Può calcolare e simulare l'ombra proiettata in base alle dimensioni e alla distanza del pannello. I dati della simulazione possono quindi essere utilizzati direttamente per configurare il sistema di controllo dell'inseguitore.